技術概要
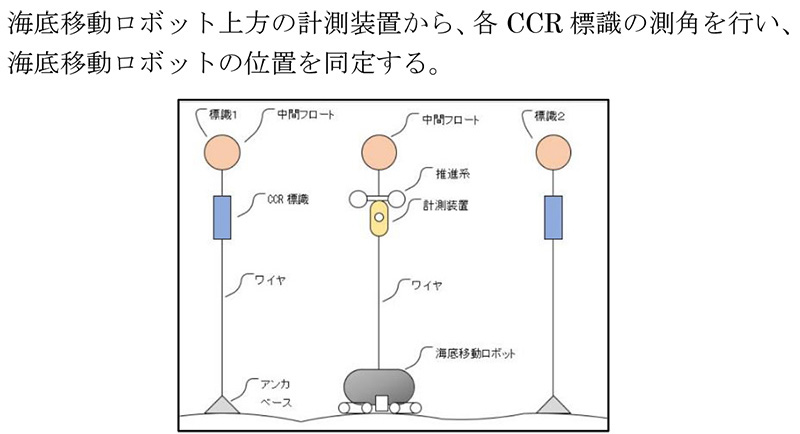
- 海中浮体を用いて光学標識を構成。
- 水平走査式光学測角計測により、高精度位置決定。
- ロボット上方への計測装置本体の位置制。
活用のポイント
- 海底資源採掘で濁った海中でのロボットの
高精位置計測システム
従来の問題点
- メタンハイドレートなどの海底での資源採掘ロボットには、水中を
正確に隈なく移動することが求められるが、水中では衛星電波を
受信できずGPSが使えない。
- ソナーでは精度が十分でなく、海底では採掘による泥・砂の
巻き上げにより視覚的見通しも悪い状況である。
解決したポイント
- 海中浮体を用いて懸濁域を回避。
- シンプルな海中浮体式光学標識を採掘域に配置。
- 光学測角による高精度な位置計測。
ライセンス情報
| ①開放特許情報DB登録番号 | L2014002271 |
|---|
| ②特許番号 | 特許第6784380号 |
|---|
| ③公開番号 | 特開2015-141163 |
|---|
| ④出願番号 | 特願2014-015653 |
|---|
| ⑤出願日 | 2014年1月30日 |
|---|
| ⑥発明の名称 | 位置計測システム |
|---|
| ⑦特許権者 | 国立大学法人鳥取大学 |
|---|
| ⑧代表発明者 | 西田 信一郎 |
|---|
| ⑨実施許諾・譲渡 | ■許諾 | □譲渡 |
|---|
| ⑩共同開発研究の意思 | ■有 | □無 |
|---|
| ⑪サンプルの提供 | □有 | ■無 |
|---|
| ⑫技術指導 | ■有 | □無 |
|---|
| ⑬実施実績 | □有 | ■試作 |
|---|
| ■実験 | □無 |
| ⑭事業化実績 | □有 | ■無 |
|---|
| ⑮実施許諾実績 | □有 | ■無 |
|---|
発明者コメント
西田 信一郎(工学研究科)
メタンハイドレートやレアメタルなどの海底資源の採掘に期待が集まっています。海底で安全・着実に採掘するためのロボットシステムの
研究・開発を進めております。本特許は、シンプルな構成で高精度に位置計測ができることが特徴です。